前回は、Donkey Car のキャリブレーションを行って、コースを走らせて教師データを取得した。今回は、教師データをGoogle Colaboratory で学習して、学習したモデルをDonkey Car に移して自動走行させてみよう。
Donkey Car の ~/mycar/data/ ディレクトリを見ると、tub_.... というディレクトリが並んでいた。

今回使用するのは、tub_6_19-07-29 と tub_7_19-07-29 だ。両方合わせて 10269 データある。これを datas.zip に圧縮してホストパソコンの ~/Donkey_Car/ ディレクトリにSFTP する。

Colabでの学習(GPU)
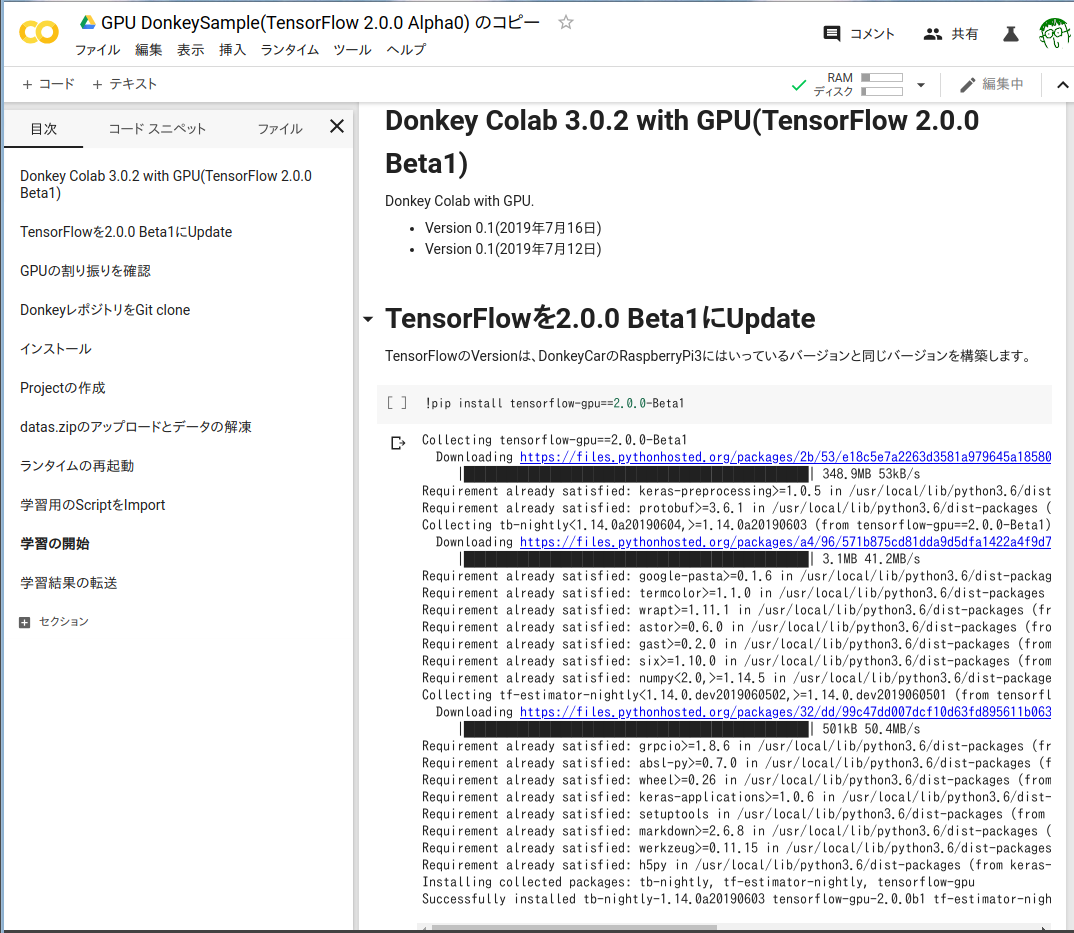
Donkey Car のGoogle Colab を起動した。
”ドライブにコピー”をクリックして、自分のGoogle Drive にコピーした。

Google Drive にDonkey Car のJupyter Notebook がコピーされたので、それを起動した。

Donkey Car のJupyter Notebook を実行していった。


datas.zip をアップロードして、解凍し、学習データとしてニューラルネットワークを学習した。

loading config file: /content/mycar/config.py
loading personal config over-rides
config loaded
"get_model_by_type" model Type is: categorical
training with model type <class 'donkeycar.parts.keras.KerasCategorical'>
Model: "model_1"
__________________________________________________________________________________________________
Layer (type) Output Shape Param # Connected to
==================================================================================================
img_in (InputLayer) [(None, 120, 160, 3) 0
__________________________________________________________________________________________________
conv2d_1 (Conv2D) (None, 58, 78, 24) 1824 img_in[0][0]
__________________________________________________________________________________________________
dropout_6 (Dropout) (None, 58, 78, 24) 0 conv2d_1[0][0]
__________________________________________________________________________________________________
conv2d_2 (Conv2D) (None, 27, 37, 32) 19232 dropout_6[0][0]
__________________________________________________________________________________________________
dropout_7 (Dropout) (None, 27, 37, 32) 0 conv2d_2[0][0]
__________________________________________________________________________________________________
conv2d_3 (Conv2D) (None, 12, 17, 64) 51264 dropout_7[0][0]
__________________________________________________________________________________________________
conv2d_4 (Conv2D) (None, 5, 8, 64) 36928 conv2d_3[0][0]
__________________________________________________________________________________________________
dropout_8 (Dropout) (None, 5, 8, 64) 0 conv2d_4[0][0]
__________________________________________________________________________________________________
conv2d_5 (Conv2D) (None, 3, 6, 64) 36928 dropout_8[0][0]
__________________________________________________________________________________________________
dropout_9 (Dropout) (None, 3, 6, 64) 0 conv2d_5[0][0]
__________________________________________________________________________________________________
flattened (Flatten) (None, 1152) 0 dropout_9[0][0]
__________________________________________________________________________________________________
fc_1 (Dense) (None, 100) 115300 flattened[0][0]
__________________________________________________________________________________________________
dropout_10 (Dropout) (None, 100) 0 fc_1[0][0]
__________________________________________________________________________________________________
fc_2 (Dense) (None, 50) 5050 dropout_10[0][0]
__________________________________________________________________________________________________
dropout_11 (Dropout) (None, 50) 0 fc_2[0][0]
__________________________________________________________________________________________________
angle_out (Dense) (None, 15) 765 dropout_11[0][0]
__________________________________________________________________________________________________
throttle_out (Dense) (None, 20) 1020 dropout_11[0][0]
==================================================================================================
Total params: 268,311
Trainable params: 268,311
Non-trainable params: 0
__________________________________________________________________________________________________
None
found 0 pickles writing json records and images in tub /content/mycar/data/tub_6_19-07-29
found 0 pickles writing json records and images in tub /content/mycar/data/tub_7_19-07-29
/content/mycar/data/tub_6_19-07-29
/content/mycar/data/tub_7_19-07-29
collating 10269 records ...
train: 8215, val: 2054
total records: 10269
steps_per_epoch 64
Epoch 1/100
63/64 [============================>.] - ETA: 0s - loss: 3.3674 - angle_out_loss: 2.2257 - throttle_out_loss: 2.2545 - angle_out_acc: 0.2696 - throttle_out_acc: 0.3826
Epoch 00001: val_loss improved from inf to 3.13174, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 12s 184ms/step - loss: 3.3630 - angle_out_loss: 2.2232 - throttle_out_loss: 2.2514 - angle_out_acc: 0.2706 - throttle_out_acc: 0.3831 - val_loss: 3.1317 - val_angle_out_loss: 1.9923 - val_throttle_out_loss: 2.1356 - val_angle_out_acc: 0.3462 - val_throttle_out_acc: 0.3809
Epoch 2/100
63/64 [============================>.] - ETA: 0s - loss: 3.1067 - angle_out_loss: 2.0148 - throttle_out_loss: 2.0993 - angle_out_acc: 0.3323 - throttle_out_acc: 0.3932
Epoch 00002: val_loss improved from 3.13174 to 2.98889, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 53ms/step - loss: 3.1063 - angle_out_loss: 2.0139 - throttle_out_loss: 2.0994 - angle_out_acc: 0.3337 - throttle_out_acc: 0.3938 - val_loss: 2.9889 - val_angle_out_loss: 1.9188 - val_throttle_out_loss: 2.0295 - val_angle_out_acc: 0.3452 - val_throttle_out_acc: 0.3862
Epoch 3/100
63/64 [============================>.] - ETA: 0s - loss: 3.0231 - angle_out_loss: 1.9465 - throttle_out_loss: 2.0499 - angle_out_acc: 0.3960 - throttle_out_acc: 0.4428
Epoch 00003: val_loss improved from 2.98889 to 2.92830, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 3.0233 - angle_out_loss: 1.9471 - throttle_out_loss: 2.0497 - angle_out_acc: 0.3971 - throttle_out_acc: 0.4431 - val_loss: 2.9283 - val_angle_out_loss: 1.8372 - val_throttle_out_loss: 2.0097 - val_angle_out_acc: 0.4624 - val_throttle_out_acc: 0.4546
Epoch 4/100
62/64 [============================>.] - ETA: 0s - loss: 2.8735 - angle_out_loss: 1.8158 - throttle_out_loss: 1.9656 - angle_out_acc: 0.4970 - throttle_out_acc: 0.4946
Epoch 00004: val_loss improved from 2.92830 to 2.69279, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 2.8727 - angle_out_loss: 1.8150 - throttle_out_loss: 1.9652 - angle_out_acc: 0.4966 - throttle_out_acc: 0.4950 - val_loss: 2.6928 - val_angle_out_loss: 1.6640 - val_throttle_out_loss: 1.8608 - val_angle_out_acc: 0.5469 - val_throttle_out_acc: 0.5000
Epoch 5/100
62/64 [============================>.] - ETA: 0s - loss: 2.7645 - angle_out_loss: 1.7299 - throttle_out_loss: 1.8995 - angle_out_acc: 0.5219 - throttle_out_acc: 0.5150
Epoch 00005: val_loss improved from 2.69279 to 2.65042, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 52ms/step - loss: 2.7651 - angle_out_loss: 1.7300 - throttle_out_loss: 1.9001 - angle_out_acc: 0.5222 - throttle_out_acc: 0.5144 - val_loss: 2.6504 - val_angle_out_loss: 1.6285 - val_throttle_out_loss: 1.8362 - val_angle_out_acc: 0.5547 - val_throttle_out_acc: 0.5249
Epoch 6/100
63/64 [============================>.] - ETA: 0s - loss: 2.6785 - angle_out_loss: 1.6660 - throttle_out_loss: 1.8455 - angle_out_acc: 0.5433 - throttle_out_acc: 0.5295
Epoch 00006: val_loss improved from 2.65042 to 2.55639, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 2.6771 - angle_out_loss: 1.6656 - throttle_out_loss: 1.8443 - angle_out_acc: 0.5436 - throttle_out_acc: 0.5295 - val_loss: 2.5564 - val_angle_out_loss: 1.5467 - val_throttle_out_loss: 1.7830 - val_angle_out_acc: 0.5791 - val_throttle_out_acc: 0.5322
Epoch 7/100
62/64 [============================>.] - ETA: 0s - loss: 2.6023 - angle_out_loss: 1.6173 - throttle_out_loss: 1.7936 - angle_out_acc: 0.5557 - throttle_out_acc: 0.5387
Epoch 00007: val_loss improved from 2.55639 to 2.53856, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 2.6040 - angle_out_loss: 1.6213 - throttle_out_loss: 1.7933 - angle_out_acc: 0.5535 - throttle_out_acc: 0.5383 - val_loss: 2.5386 - val_angle_out_loss: 1.5468 - val_throttle_out_loss: 1.7651 - val_angle_out_acc: 0.5542 - val_throttle_out_acc: 0.5347
Epoch 8/100
63/64 [============================>.] - ETA: 0s - loss: 2.5492 - angle_out_loss: 1.5788 - throttle_out_loss: 1.7598 - angle_out_acc: 0.5590 - throttle_out_acc: 0.5484
Epoch 00008: val_loss improved from 2.53856 to 2.48855, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 2.5489 - angle_out_loss: 1.5782 - throttle_out_loss: 1.7598 - angle_out_acc: 0.5591 - throttle_out_acc: 0.5487 - val_loss: 2.4886 - val_angle_out_loss: 1.5071 - val_throttle_out_loss: 1.7350 - val_angle_out_acc: 0.5752 - val_throttle_out_acc: 0.5439
Epoch 9/100
63/64 [============================>.] - ETA: 0s - loss: 2.4850 - angle_out_loss: 1.5364 - throttle_out_loss: 1.7168 - angle_out_acc: 0.5671 - throttle_out_acc: 0.5530
Epoch 00009: val_loss improved from 2.48855 to 2.45861, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 2.4876 - angle_out_loss: 1.5366 - throttle_out_loss: 1.7193 - angle_out_acc: 0.5669 - throttle_out_acc: 0.5521 - val_loss: 2.4586 - val_angle_out_loss: 1.4642 - val_throttle_out_loss: 1.7265 - val_angle_out_acc: 0.5908 - val_throttle_out_acc: 0.5547
Epoch 10/100
63/64 [============================>.] - ETA: 0s - loss: 2.4513 - angle_out_loss: 1.5038 - throttle_out_loss: 1.6994 - angle_out_acc: 0.5754 - throttle_out_acc: 0.5577
Epoch 00010: val_loss improved from 2.45861 to 2.42520, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 52ms/step - loss: 2.4534 - angle_out_loss: 1.5047 - throttle_out_loss: 1.7010 - angle_out_acc: 0.5748 - throttle_out_acc: 0.5569 - val_loss: 2.4252 - val_angle_out_loss: 1.4220 - val_throttle_out_loss: 1.7142 - val_angle_out_acc: 0.5820 - val_throttle_out_acc: 0.5449
Epoch 11/100
62/64 [============================>.] - ETA: 0s - loss: 2.4054 - angle_out_loss: 1.4839 - throttle_out_loss: 1.6635 - angle_out_acc: 0.5725 - throttle_out_acc: 0.5601
Epoch 00011: val_loss improved from 2.42520 to 2.36648, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 52ms/step - loss: 2.4062 - angle_out_loss: 1.4828 - throttle_out_loss: 1.6648 - angle_out_acc: 0.5730 - throttle_out_acc: 0.5603 - val_loss: 2.3665 - val_angle_out_loss: 1.3953 - val_throttle_out_loss: 1.6688 - val_angle_out_acc: 0.6045 - val_throttle_out_acc: 0.5698
Epoch 12/100
63/64 [============================>.] - ETA: 0s - loss: 2.3627 - angle_out_loss: 1.4525 - throttle_out_loss: 1.6365 - angle_out_acc: 0.5794 - throttle_out_acc: 0.5682
Epoch 00012: val_loss improved from 2.36648 to 2.31995, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 2.3616 - angle_out_loss: 1.4535 - throttle_out_loss: 1.6349 - angle_out_acc: 0.5793 - throttle_out_acc: 0.5680 - val_loss: 2.3199 - val_angle_out_loss: 1.3824 - val_throttle_out_loss: 1.6288 - val_angle_out_acc: 0.5928 - val_throttle_out_acc: 0.5635
Epoch 13/100
63/64 [============================>.] - ETA: 0s - loss: 2.3167 - angle_out_loss: 1.4297 - throttle_out_loss: 1.6018 - angle_out_acc: 0.5877 - throttle_out_acc: 0.5725
Epoch 00013: val_loss improved from 2.31995 to 2.31693, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 2.3165 - angle_out_loss: 1.4279 - throttle_out_loss: 1.6026 - angle_out_acc: 0.5880 - throttle_out_acc: 0.5724 - val_loss: 2.3169 - val_angle_out_loss: 1.3568 - val_throttle_out_loss: 1.6385 - val_angle_out_acc: 0.5928 - val_throttle_out_acc: 0.5605
Epoch 14/100
62/64 [============================>.] - ETA: 0s - loss: 2.2868 - angle_out_loss: 1.4144 - throttle_out_loss: 1.5796 - angle_out_acc: 0.5868 - throttle_out_acc: 0.5766
Epoch 00014: val_loss improved from 2.31693 to 2.24896, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 2.2894 - angle_out_loss: 1.4154 - throttle_out_loss: 1.5817 - angle_out_acc: 0.5872 - throttle_out_acc: 0.5752 - val_loss: 2.2490 - val_angle_out_loss: 1.3076 - val_throttle_out_loss: 1.5952 - val_angle_out_acc: 0.6035 - val_throttle_out_acc: 0.5737
Epoch 15/100
63/64 [============================>.] - ETA: 0s - loss: 2.2467 - angle_out_loss: 1.3801 - throttle_out_loss: 1.5566 - angle_out_acc: 0.5887 - throttle_out_acc: 0.5745
Epoch 00015: val_loss did not improve from 2.24896
64/64 [==============================] - 3s 50ms/step - loss: 2.2467 - angle_out_loss: 1.3810 - throttle_out_loss: 1.5562 - angle_out_acc: 0.5884 - throttle_out_acc: 0.5742 - val_loss: 2.2712 - val_angle_out_loss: 1.3112 - val_throttle_out_loss: 1.6156 - val_angle_out_acc: 0.6089 - val_throttle_out_acc: 0.5625
Epoch 16/100
63/64 [============================>.] - ETA: 0s - loss: 2.2113 - angle_out_loss: 1.3579 - throttle_out_loss: 1.5323 - angle_out_acc: 0.5946 - throttle_out_acc: 0.5812
Epoch 00016: val_loss improved from 2.24896 to 2.23349, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 50ms/step - loss: 2.2103 - angle_out_loss: 1.3572 - throttle_out_loss: 1.5316 - angle_out_acc: 0.5953 - throttle_out_acc: 0.5813 - val_loss: 2.2335 - val_angle_out_loss: 1.2920 - val_throttle_out_loss: 1.5875 - val_angle_out_acc: 0.6113 - val_throttle_out_acc: 0.5732
Epoch 17/100
62/64 [============================>.] - ETA: 0s - loss: 2.1604 - angle_out_loss: 1.3338 - throttle_out_loss: 1.4935 - angle_out_acc: 0.5997 - throttle_out_acc: 0.5882
Epoch 00017: val_loss improved from 2.23349 to 2.20767, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 2.1608 - angle_out_loss: 1.3312 - throttle_out_loss: 1.4952 - angle_out_acc: 0.6007 - throttle_out_acc: 0.5875 - val_loss: 2.2077 - val_angle_out_loss: 1.2500 - val_throttle_out_loss: 1.5827 - val_angle_out_acc: 0.6270 - val_throttle_out_acc: 0.5757
Epoch 18/100
62/64 [============================>.] - ETA: 0s - loss: 2.1226 - angle_out_loss: 1.3036 - throttle_out_loss: 1.4708 - angle_out_acc: 0.6040 - throttle_out_acc: 0.5903
Epoch 00018: val_loss improved from 2.20767 to 2.18893, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 50ms/step - loss: 2.1239 - angle_out_loss: 1.3017 - throttle_out_loss: 1.4730 - angle_out_acc: 0.6046 - throttle_out_acc: 0.5903 - val_loss: 2.1889 - val_angle_out_loss: 1.2589 - val_throttle_out_loss: 1.5595 - val_angle_out_acc: 0.6172 - val_throttle_out_acc: 0.5835
Epoch 19/100
62/64 [============================>.] - ETA: 0s - loss: 2.0955 - angle_out_loss: 1.2993 - throttle_out_loss: 1.4459 - angle_out_acc: 0.6119 - throttle_out_acc: 0.6006
Epoch 00019: val_loss improved from 2.18893 to 2.16634, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 2.1009 - angle_out_loss: 1.3013 - throttle_out_loss: 1.4503 - angle_out_acc: 0.6113 - throttle_out_acc: 0.5996 - val_loss: 2.1663 - val_angle_out_loss: 1.2460 - val_throttle_out_loss: 1.5433 - val_angle_out_acc: 0.6211 - val_throttle_out_acc: 0.5923
Epoch 20/100
63/64 [============================>.] - ETA: 0s - loss: 2.0628 - angle_out_loss: 1.2745 - throttle_out_loss: 1.4256 - angle_out_acc: 0.6136 - throttle_out_acc: 0.6017
Epoch 00020: val_loss did not improve from 2.16634
64/64 [==============================] - 3s 50ms/step - loss: 2.0644 - angle_out_loss: 1.2772 - throttle_out_loss: 1.4259 - angle_out_acc: 0.6121 - throttle_out_acc: 0.6019 - val_loss: 2.1808 - val_angle_out_loss: 1.2118 - val_throttle_out_loss: 1.5749 - val_angle_out_acc: 0.6313 - val_throttle_out_acc: 0.5771
Epoch 21/100
63/64 [============================>.] - ETA: 0s - loss: 2.0410 - angle_out_loss: 1.2611 - throttle_out_loss: 1.4104 - angle_out_acc: 0.6146 - throttle_out_acc: 0.6104
Epoch 00021: val_loss improved from 2.16634 to 2.15919, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 2.0427 - angle_out_loss: 1.2631 - throttle_out_loss: 1.4111 - angle_out_acc: 0.6147 - throttle_out_acc: 0.6101 - val_loss: 2.1592 - val_angle_out_loss: 1.2323 - val_throttle_out_loss: 1.5430 - val_angle_out_acc: 0.6284 - val_throttle_out_acc: 0.5903
Epoch 22/100
63/64 [============================>.] - ETA: 0s - loss: 2.0196 - angle_out_loss: 1.2475 - throttle_out_loss: 1.3958 - angle_out_acc: 0.6190 - throttle_out_acc: 0.6040
Epoch 00022: val_loss improved from 2.15919 to 2.09381, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 50ms/step - loss: 2.0210 - angle_out_loss: 1.2475 - throttle_out_loss: 1.3973 - angle_out_acc: 0.6200 - throttle_out_acc: 0.6041 - val_loss: 2.0938 - val_angle_out_loss: 1.1728 - val_throttle_out_loss: 1.5074 - val_angle_out_acc: 0.6406 - val_throttle_out_acc: 0.5923
Epoch 23/100
63/64 [============================>.] - ETA: 0s - loss: 1.9801 - angle_out_loss: 1.2206 - throttle_out_loss: 1.3698 - angle_out_acc: 0.6231 - throttle_out_acc: 0.6128
Epoch 00023: val_loss improved from 2.09381 to 2.08714, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 1.9815 - angle_out_loss: 1.2210 - throttle_out_loss: 1.3710 - angle_out_acc: 0.6224 - throttle_out_acc: 0.6121 - val_loss: 2.0871 - val_angle_out_loss: 1.1866 - val_throttle_out_loss: 1.4938 - val_angle_out_acc: 0.6401 - val_throttle_out_acc: 0.6104
Epoch 24/100
62/64 [============================>.] - ETA: 0s - loss: 1.9418 - angle_out_loss: 1.2092 - throttle_out_loss: 1.3372 - angle_out_acc: 0.6261 - throttle_out_acc: 0.6196
Epoch 00024: val_loss did not improve from 2.08714
64/64 [==============================] - 3s 50ms/step - loss: 1.9433 - angle_out_loss: 1.2085 - throttle_out_loss: 1.3391 - angle_out_acc: 0.6266 - throttle_out_acc: 0.6180 - val_loss: 2.0993 - val_angle_out_loss: 1.1816 - val_throttle_out_loss: 1.5085 - val_angle_out_acc: 0.6465 - val_throttle_out_acc: 0.5864
Epoch 25/100
62/64 [============================>.] - ETA: 0s - loss: 1.9338 - angle_out_loss: 1.2083 - throttle_out_loss: 1.3297 - angle_out_acc: 0.6255 - throttle_out_acc: 0.6216
Epoch 00025: val_loss improved from 2.08714 to 2.06859, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 50ms/step - loss: 1.9345 - angle_out_loss: 1.2086 - throttle_out_loss: 1.3302 - angle_out_acc: 0.6249 - throttle_out_acc: 0.6223 - val_loss: 2.0686 - val_angle_out_loss: 1.1483 - val_throttle_out_loss: 1.4944 - val_angle_out_acc: 0.6548 - val_throttle_out_acc: 0.5981
Epoch 26/100
62/64 [============================>.] - ETA: 0s - loss: 1.9065 - angle_out_loss: 1.1931 - throttle_out_loss: 1.3100 - angle_out_acc: 0.6347 - throttle_out_acc: 0.6264
Epoch 00026: val_loss improved from 2.06859 to 2.04724, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 50ms/step - loss: 1.9099 - angle_out_loss: 1.1940 - throttle_out_loss: 1.3129 - angle_out_acc: 0.6349 - throttle_out_acc: 0.6260 - val_loss: 2.0472 - val_angle_out_loss: 1.1247 - val_throttle_out_loss: 1.4849 - val_angle_out_acc: 0.6597 - val_throttle_out_acc: 0.6099
Epoch 27/100
63/64 [============================>.] - ETA: 0s - loss: 1.8839 - angle_out_loss: 1.1701 - throttle_out_loss: 1.2988 - angle_out_acc: 0.6394 - throttle_out_acc: 0.6255
Epoch 00027: val_loss did not improve from 2.04724
64/64 [==============================] - 3s 50ms/step - loss: 1.8852 - angle_out_loss: 1.1681 - throttle_out_loss: 1.3012 - angle_out_acc: 0.6398 - throttle_out_acc: 0.6250 - val_loss: 2.0572 - val_angle_out_loss: 1.1412 - val_throttle_out_loss: 1.4866 - val_angle_out_acc: 0.6479 - val_throttle_out_acc: 0.5933
Epoch 28/100
63/64 [============================>.] - ETA: 0s - loss: 1.8520 - angle_out_loss: 1.1541 - throttle_out_loss: 1.2749 - angle_out_acc: 0.6404 - throttle_out_acc: 0.6341
Epoch 00028: val_loss did not improve from 2.04724
64/64 [==============================] - 3s 50ms/step - loss: 1.8504 - angle_out_loss: 1.1530 - throttle_out_loss: 1.2740 - angle_out_acc: 0.6406 - throttle_out_acc: 0.6342 - val_loss: 2.0524 - val_angle_out_loss: 1.1295 - val_throttle_out_loss: 1.4877 - val_angle_out_acc: 0.6543 - val_throttle_out_acc: 0.5962
Epoch 29/100
62/64 [============================>.] - ETA: 0s - loss: 1.8219 - angle_out_loss: 1.1461 - throttle_out_loss: 1.2488 - angle_out_acc: 0.6444 - throttle_out_acc: 0.6342
Epoch 00029: val_loss did not improve from 2.04724
64/64 [==============================] - 3s 50ms/step - loss: 1.8202 - angle_out_loss: 1.1419 - throttle_out_loss: 1.2493 - angle_out_acc: 0.6456 - throttle_out_acc: 0.6344 - val_loss: 2.0724 - val_angle_out_loss: 1.1363 - val_throttle_out_loss: 1.5042 - val_angle_out_acc: 0.6602 - val_throttle_out_acc: 0.6060
Epoch 30/100
63/64 [============================>.] - ETA: 0s - loss: 1.8018 - angle_out_loss: 1.1369 - throttle_out_loss: 1.2334 - angle_out_acc: 0.6469 - throttle_out_acc: 0.6393
Epoch 00030: val_loss improved from 2.04724 to 2.03566, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 1.8012 - angle_out_loss: 1.1339 - throttle_out_loss: 1.2343 - angle_out_acc: 0.6475 - throttle_out_acc: 0.6389 - val_loss: 2.0357 - val_angle_out_loss: 1.1356 - val_throttle_out_loss: 1.4679 - val_angle_out_acc: 0.6475 - val_throttle_out_acc: 0.6104
Epoch 31/100
62/64 [============================>.] - ETA: 0s - loss: 1.7853 - angle_out_loss: 1.1236 - throttle_out_loss: 1.2235 - angle_out_acc: 0.6479 - throttle_out_acc: 0.6462
Epoch 00031: val_loss improved from 2.03566 to 2.02520, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 1.7898 - angle_out_loss: 1.1253 - throttle_out_loss: 1.2271 - angle_out_acc: 0.6472 - throttle_out_acc: 0.6450 - val_loss: 2.0252 - val_angle_out_loss: 1.1151 - val_throttle_out_loss: 1.4677 - val_angle_out_acc: 0.6616 - val_throttle_out_acc: 0.6143
Epoch 32/100
62/64 [============================>.] - ETA: 0s - loss: 1.7563 - angle_out_loss: 1.1123 - throttle_out_loss: 1.2002 - angle_out_acc: 0.6503 - throttle_out_acc: 0.6525
Epoch 00032: val_loss did not improve from 2.02520
64/64 [==============================] - 3s 50ms/step - loss: 1.7569 - angle_out_loss: 1.1140 - throttle_out_loss: 1.1998 - angle_out_acc: 0.6493 - throttle_out_acc: 0.6523 - val_loss: 2.0255 - val_angle_out_loss: 1.1203 - val_throttle_out_loss: 1.4654 - val_angle_out_acc: 0.6572 - val_throttle_out_acc: 0.6123
Epoch 33/100
63/64 [============================>.] - ETA: 0s - loss: 1.7554 - angle_out_loss: 1.1136 - throttle_out_loss: 1.1985 - angle_out_acc: 0.6458 - throttle_out_acc: 0.6498
Epoch 00033: val_loss did not improve from 2.02520
64/64 [==============================] - 3s 50ms/step - loss: 1.7560 - angle_out_loss: 1.1128 - throttle_out_loss: 1.1996 - angle_out_acc: 0.6458 - throttle_out_acc: 0.6493 - val_loss: 2.0505 - val_angle_out_loss: 1.1340 - val_throttle_out_loss: 1.4835 - val_angle_out_acc: 0.6592 - val_throttle_out_acc: 0.6099
Epoch 34/100
63/64 [============================>.] - ETA: 0s - loss: 1.7325 - angle_out_loss: 1.1067 - throttle_out_loss: 1.1791 - angle_out_acc: 0.6527 - throttle_out_acc: 0.6545
Epoch 00034: val_loss improved from 2.02520 to 1.99127, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 1.7275 - angle_out_loss: 1.1035 - throttle_out_loss: 1.1757 - angle_out_acc: 0.6533 - throttle_out_acc: 0.6553 - val_loss: 1.9913 - val_angle_out_loss: 1.0866 - val_throttle_out_loss: 1.4480 - val_angle_out_acc: 0.6636 - val_throttle_out_acc: 0.6226
Epoch 35/100
63/64 [============================>.] - ETA: 0s - loss: 1.7103 - angle_out_loss: 1.0837 - throttle_out_loss: 1.1684 - angle_out_acc: 0.6601 - throttle_out_acc: 0.6572
Epoch 00035: val_loss did not improve from 1.99127
64/64 [==============================] - 3s 50ms/step - loss: 1.7076 - angle_out_loss: 1.0810 - throttle_out_loss: 1.1672 - angle_out_acc: 0.6608 - throttle_out_acc: 0.6576 - val_loss: 1.9994 - val_angle_out_loss: 1.0877 - val_throttle_out_loss: 1.4555 - val_angle_out_acc: 0.6660 - val_throttle_out_acc: 0.6099
Epoch 36/100
63/64 [============================>.] - ETA: 0s - loss: 1.6924 - angle_out_loss: 1.0825 - throttle_out_loss: 1.1511 - angle_out_acc: 0.6592 - throttle_out_acc: 0.6610
Epoch 00036: val_loss did not improve from 1.99127
64/64 [==============================] - 3s 50ms/step - loss: 1.6950 - angle_out_loss: 1.0821 - throttle_out_loss: 1.1539 - angle_out_acc: 0.6593 - throttle_out_acc: 0.6594 - val_loss: 2.0371 - val_angle_out_loss: 1.1129 - val_throttle_out_loss: 1.4807 - val_angle_out_acc: 0.6567 - val_throttle_out_acc: 0.6104
Epoch 37/100
63/64 [============================>.] - ETA: 0s - loss: 1.6769 - angle_out_loss: 1.0704 - throttle_out_loss: 1.1417 - angle_out_acc: 0.6638 - throttle_out_acc: 0.6616
Epoch 00037: val_loss did not improve from 1.99127
64/64 [==============================] - 3s 50ms/step - loss: 1.6785 - angle_out_loss: 1.0716 - throttle_out_loss: 1.1427 - angle_out_acc: 0.6636 - throttle_out_acc: 0.6611 - val_loss: 2.0072 - val_angle_out_loss: 1.0874 - val_throttle_out_loss: 1.4635 - val_angle_out_acc: 0.6646 - val_throttle_out_acc: 0.6118
Epoch 38/100
63/64 [============================>.] - ETA: 0s - loss: 1.6569 - angle_out_loss: 1.0749 - throttle_out_loss: 1.1194 - angle_out_acc: 0.6618 - throttle_out_acc: 0.6710
Epoch 00038: val_loss did not improve from 1.99127
64/64 [==============================] - 3s 50ms/step - loss: 1.6566 - angle_out_loss: 1.0776 - throttle_out_loss: 1.1178 - angle_out_acc: 0.6605 - throttle_out_acc: 0.6713 - val_loss: 2.0223 - val_angle_out_loss: 1.0740 - val_throttle_out_loss: 1.4853 - val_angle_out_acc: 0.6782 - val_throttle_out_acc: 0.6196
Epoch 39/100
63/64 [============================>.] - ETA: 0s - loss: 1.6337 - angle_out_loss: 1.0643 - throttle_out_loss: 1.1015 - angle_out_acc: 0.6638 - throttle_out_acc: 0.6716
Epoch 00039: val_loss improved from 1.99127 to 1.94174, saving model to /content/mycar/models/mypilot.h5
64/64 [==============================] - 3s 51ms/step - loss: 1.6348 - angle_out_loss: 1.0660 - throttle_out_loss: 1.1018 - angle_out_acc: 0.6639 - throttle_out_acc: 0.6718 - val_loss: 1.9417 - val_angle_out_loss: 1.1158 - val_throttle_out_loss: 1.3838 - val_angle_out_acc: 0.6641 - val_throttle_out_acc: 0.6177
Epoch 40/100
63/64 [============================>.] - ETA: 0s - loss: 1.6047 - angle_out_loss: 1.0482 - throttle_out_loss: 1.0806 - angle_out_acc: 0.6632 - throttle_out_acc: 0.6727
Epoch 00040: val_loss did not improve from 1.94174
64/64 [==============================] - 3s 50ms/step - loss: 1.6059 - angle_out_loss: 1.0478 - throttle_out_loss: 1.0820 - angle_out_acc: 0.6638 - throttle_out_acc: 0.6726 - val_loss: 2.1267 - val_angle_out_loss: 1.1378 - val_throttle_out_loss: 1.5578 - val_angle_out_acc: 0.6611 - val_throttle_out_acc: 0.5977
Epoch 41/100
63/64 [============================>.] - ETA: 0s - loss: 1.6027 - angle_out_loss: 1.0421 - throttle_out_loss: 1.0816 - angle_out_acc: 0.6705 - throttle_out_acc: 0.6760
Epoch 00041: val_loss did not improve from 1.94174
64/64 [==============================] - 3s 50ms/step - loss: 1.6017 - angle_out_loss: 1.0461 - throttle_out_loss: 1.0786 - angle_out_acc: 0.6697 - throttle_out_acc: 0.6770 - val_loss: 2.0650 - val_angle_out_loss: 1.0897 - val_throttle_out_loss: 1.5202 - val_angle_out_acc: 0.6782 - val_throttle_out_acc: 0.6074
Epoch 42/100
62/64 [============================>.] - ETA: 0s - loss: 1.6009 - angle_out_loss: 1.0586 - throttle_out_loss: 1.0716 - angle_out_acc: 0.6682 - throttle_out_acc: 0.6746
Epoch 00042: val_loss did not improve from 1.94174
64/64 [==============================] - 3s 51ms/step - loss: 1.5973 - angle_out_loss: 1.0587 - throttle_out_loss: 1.0679 - angle_out_acc: 0.6682 - throttle_out_acc: 0.6753 - val_loss: 2.0174 - val_angle_out_loss: 1.0967 - val_throttle_out_loss: 1.4690 - val_angle_out_acc: 0.6685 - val_throttle_out_acc: 0.6221
Epoch 43/100
63/64 [============================>.] - ETA: 0s - loss: 1.5671 - angle_out_loss: 1.0455 - throttle_out_loss: 1.0444 - angle_out_acc: 0.6656 - throttle_out_acc: 0.6837
Epoch 00043: val_loss did not improve from 1.94174
64/64 [==============================] - 3s 50ms/step - loss: 1.5656 - angle_out_loss: 1.0453 - throttle_out_loss: 1.0430 - angle_out_acc: 0.6660 - throttle_out_acc: 0.6840 - val_loss: 2.0173 - val_angle_out_loss: 1.1034 - val_throttle_out_loss: 1.4656 - val_angle_out_acc: 0.6606 - val_throttle_out_acc: 0.6128
Epoch 44/100
63/64 [============================>.] - ETA: 0s - loss: 1.5590 - angle_out_loss: 1.0230 - throttle_out_loss: 1.0475 - angle_out_acc: 0.6747 - throttle_out_acc: 0.6850
Epoch 00044: val_loss did not improve from 1.94174
64/64 [==============================] - 3s 50ms/step - loss: 1.5619 - angle_out_loss: 1.0276 - throttle_out_loss: 1.0481 - angle_out_acc: 0.6736 - throttle_out_acc: 0.6849 - val_loss: 2.0355 - val_angle_out_loss: 1.0995 - val_throttle_out_loss: 1.4858 - val_angle_out_acc: 0.6763 - val_throttle_out_acc: 0.6069
Epoch 00044: early stopping
Training completed in 0:02:31.

68 % 程度の精度だった。低い。。。やはり、家の中を白線無しで学習させたのが良くなかったのかも?
学習済みデータ mypilot.h5 をダウンロードした。

自動走行
Donkey Car のRaspberry Pi に mypilot.h5 をアップロードした。

myconfig.py を表示して、
に変更した。DEFAULT_MODEL_TYPE="categorical"

mycar ディレクトリで下のコマンドを実行して自動走行させた。
python manage.py drive --model ~/mycar/models/mypilot.h5

(env) pi@donkeypi:~/mycar $ python manage.py drive --model ~/mycar/models/mypilot.h5
using donkey v3.0.2 ...
loading config file: /home/pi/mycar/config.py
loading personal config over-rides
config loaded
cfg.CAMERA_TYPE PICAM
PiCamera loaded.. .warming camera
Adding part PiCamera.
Starting Donkey Server...
Adding part LocalWebController.
Adding part ThrottleFilter.
Adding part PilotCondition.
Adding part RecordTracker.
"get_model_by_type" model Type is: categorical
loading model /home/pi/mycar/models/mypilot.h5
finished loading in 12.697422981262207 sec.
Adding part FileWatcher.
Adding part FileWatcher.
Adding part DelayedTrigger.
Adding part TriggeredCallback.
Adding part KerasCategorical.
Adding part DriveMode.
Adding part AiLaunch.
Adding part AiRunCondition.
Init ESC
Adding part PWMSteering.
Adding part PWMThrottle.
Tub does NOT exist. Creating new tub...
New tub created at: /home/pi/mycar/data/tub_8_19-07-30
Adding part TubWriter.
You can now go to <your pi ip address>:8887 to drive your car.
Starting vehicle...
8887
/usr/lib/python3/dist-packages/picamera/encoders.py:544: PiCameraResolutionRounded: frame size rounded up from 160x120 to 160x128
width, height, fwidth, fheight)))
WARNING: Logging before flag parsing goes to stderr.
W0730 20:43:33.409733 1518576752 web.py:2246] 404 GET /favicon.ico (192.168.3.7) 11.80ms
ブラウザで 192.168.3.34:8887 を見るとカメラ画像が表示されていた。

Mode & Pilot を Local Pilot (d) に変更したところ、自動走行がスタートした。
精度が低いので、自動走行では正しく走らなかったが、正しい方向に曲がる意志は確認できた。
^CShutting down vehicle and its parts...
stoping PiCamera
Part Profile Summary: (times in ms)
+--------------------+------------------+-------+--------------+
| part | max | min | avg |
+--------------------+------------------+-------+--------------+
| PWMThrottle | 20.27 | 1.46 | 2.60 |
| FileWatcher | 7.28 | 0.08 | 0.23 |
| PWMSteering | 1564516404941.14 | 1.55 | 128660891.52 |
| LocalWebController | 0.63 | 0.04 | 0.11 |
| DriveMode | 0.80 | 0.04 | 0.08 |
| AiRunCondition | 0.46 | 0.02 | 0.05 |
| ThrottleFilter | 0.49 | 0.03 | 0.06 |
| PilotCondition | 0.26 | 0.02 | 0.05 |
| RecordTracker | 0.30 | 0.02 | 0.05 |
| KerasCategorical | 2200.69 | 42.03 | 72.93 |
| TriggeredCallback | 0.29 | 0.02 | 0.03 |
| PiCamera | 0.50 | 0.02 | 0.07 |
| AiLaunch | 0.76 | 0.03 | 0.06 |
| FileWatcher | 1.64 | 0.04 | 0.08 |
| DelayedTrigger | 0.18 | 0.02 | 0.04 |
+--------------------+------------------+-------+--------------+
tub_7_19-07-29 ディレクトリの最初の学習データ (160 x 120 ピクセル)を示す。

そのJSON ファイル、record_1.json を示す。
{"user/mode": "user", "user/angle": 0.0, "user/throttle": 3.051850947599719e-05, "cam/image_array": "1_cam-image_array_.jpg", "milliseconds": 323}

コメント